Algorithms for Control of Building-Scale Tensegrity Structures
Machine Learning and Robotics
 Go to portfolio.
Go to portfolio.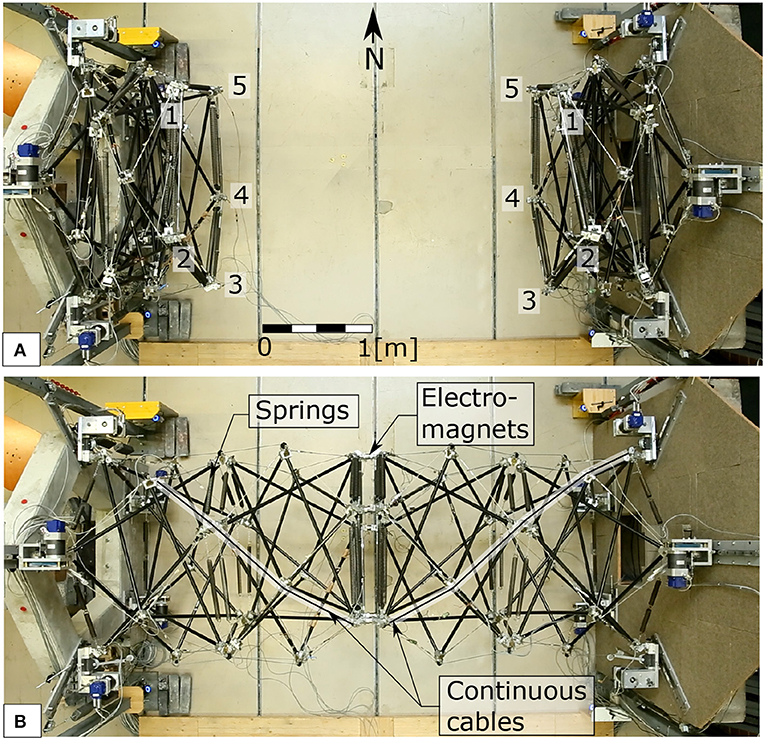
Machine Learning To Enable Smart Structures
At a research internship at the École polytechnique fédérale de Lausanne in Switzerland, I worked to develop algorithms to control the deployment of a tensegrity footbridge structure, that could be compressed for storage or lengthened to deploy across a gap by controlling a series of cables.
Tensegrities are extremely beautiful, lightweight and strong, but they are difficult to design and model, especially in the case of a deployable structure.
I applied neural networks to improve numerical modeling of the structure’s behaviour, and researched how machine learning could be used to improve pathfinding performance in high-dimensional search spaces. I also did preliminary work applying clustering to automatically detect broken or damaged structural members. My experience gained in this lab using VICON optical tracking software to record the motion of complex structures would be an asset for many robotics and HCI research projects.
Contributions: Concept and implementation (of control algorithms only). Some of my work was eventually used in a 2018 paper by Dr. Ann Sychterz (the Ph.D. student who supervised my project) and Prof. Ian Smith (director of the lab), for which I received an acknowledgement. Images are courtesy of the IMAC Lab.